
GPU Architecture
1. 量化研究方法
2. 4.4 图形处理器
CPU 程序员的挑战不只是在 GPU 上获得出色的性能,还有协调系统处理器与 GPU 上的计算调度,以及系统存储器与 GPU 存储器之间的数据传输。
GPU 中的并行:多线程、MIMD、SIMD 和指令级并行。
NVIDIA 将 CUDA 编程定义为 SIMT -- 单指令多线程。
并行执行和线程管理由 GPU 硬件负责,而不是由应用程序或者操作系统完成。详解见 Q1
The hardware Thread Block Scheduler assigns Thread Blocks to multithreaded SIMD Processors, and the hardware Thread Scheduler picks which thread of SIMD instructions to run each clock cycle within a SIMD Processor.
硬件线程块调度器(Thread Block Scheduler)将线程块(Thread Blocks)分配给多线程 SIMD 处理器(multithreaded SIMD Processors),而硬件线程调度器(Thread Scheduler)在每个时钟周期内选择要在 SIMD 处理器中运行的 SIMD 指令线程(thread of SIMD instructions)。详细解释见 Q2
3. Stream, kernel, device
3.1. 关系图
这几个概念在 GPU 编程中很常见,其关系可以简单由下图表示:
+------------------+ +----------------+
| Host (CPU) | | Device (GPU) |
| | | |
| Launch Kernel | -----------> | Kernel Grid |
| | | Thread Blocks |
| | | Threads |
+------------------+ +----------------+
| ▲
| 控制流/数据拷贝 |
| |
v |
+----------------+ +------------------+
| Stream 0 | ----------> | Kernel A |
+----------------+ +------------------+
| Stream 1 | ----------> | Kernel B |
+----------------+ +------------------+3.2. Device
Device 是指 GPU 本身,相对于运行主程序的 host(通常是 CPU)。
在多 GPU 系统中,每个 GPU 都是一个 device。
可以用 API 来查询和选择当前使用的 device(例如 cudaSetDevice () 或 hipSetDevice ())。
GPU 的内存(device memory)和 CPU 的内存是分开的,通常需要显式拷贝数据。
一个 GPU(device)内部通常包含多个 SM(Streaming Multiprocessors),每个 SM 可以并发执行多个 warp(每个 warp 是 32 个线程的调度单元)。
3.3. Kernel
Kernel 是运行在 GPU 上的 函数,由 host 发起调用。
Kernel 是大规模并行执行的最小执行单元,多个线程并发运行同一个 kernel。
在 CUDA/ROCm 中,通过语法类似
kernel<<<grid, block>>>(...)来发起执行。Grid: 指的是 thread blocks 的网格布局
Block: 指的是 block 中线程的个数和布局
Kernel 执行时的数据并行性由开发者设计。
一个 kernel 实际上被分割为多个 block,每个 block 被绑定到一个 SM,直到所有 block 执行完成为止。
3.4. Stream
Stream 是 GPU 上执行指令的 执行队列。
每个 stream 中的操作是 顺序执行 的,但不同 stream 可以并行执行。
可以利用多个 stream 来实现 kernel 执行和数据拷贝的并发(比如 copy + compute overlap)。
默认的 stream 是 0,叫 default stream 或 legacy stream。
非默认 stream 被称为 explicit streams,允许更细粒度的并发控制。
实际的硬件交互映射关系如下图所示:
+--------------------+ +---------------------------+
| CPU (Host) | | GPU |
|--------------------| |---------------------------|
| API: cudaMemcpy | ======> | DMA Engine |
| API: kernel launch | ======> | Command Processor (GPC) |
| | | └── dispatch to SMs |
+--------------------+ | └── Warp Schedulers |
| └── Threads |
+---------------------------+再参考 GPU 的存储结构设计以加深印象:
4. Warp
4.1. Todo
5. Q1
并行执行和线程管理由 GPU 硬件负责,而不是由应用程序或者操作系统完成。
这句话的含义是:在 GPU 中,并行任务的执行和线程调度完全由硬件架构直接管理,而非依赖应用程序或操作系统的软件层面控制。这种设计使得 GPU 能够高效实现大规模并行计算,同时降低编程复杂度。
5.1. 具体解释
以下是具体解释:
硬件直接管理并行执行:GPU 通过 SIMT(单指令多线程) 架构实现并行性。其核心思想是:单条指令同时控制多个线程,这些线程共享指令流但处理不同的数据。例如,一个线程束(Warp)包含 32 或 64 个线程,由硬件调度器自动分配到流多处理器(SM)的计算单元上执行。同一 Warp 内的线程必须执行相同指令,但每个线程的数据路径独立,因此可以灵活处理分支逻辑(如条件判断)。 相比之下,CPU 的并行执行依赖操作系统的线程调度(如多核任务分配),而 GPU 的线程调度完全由硬件实现,无需软件介入。
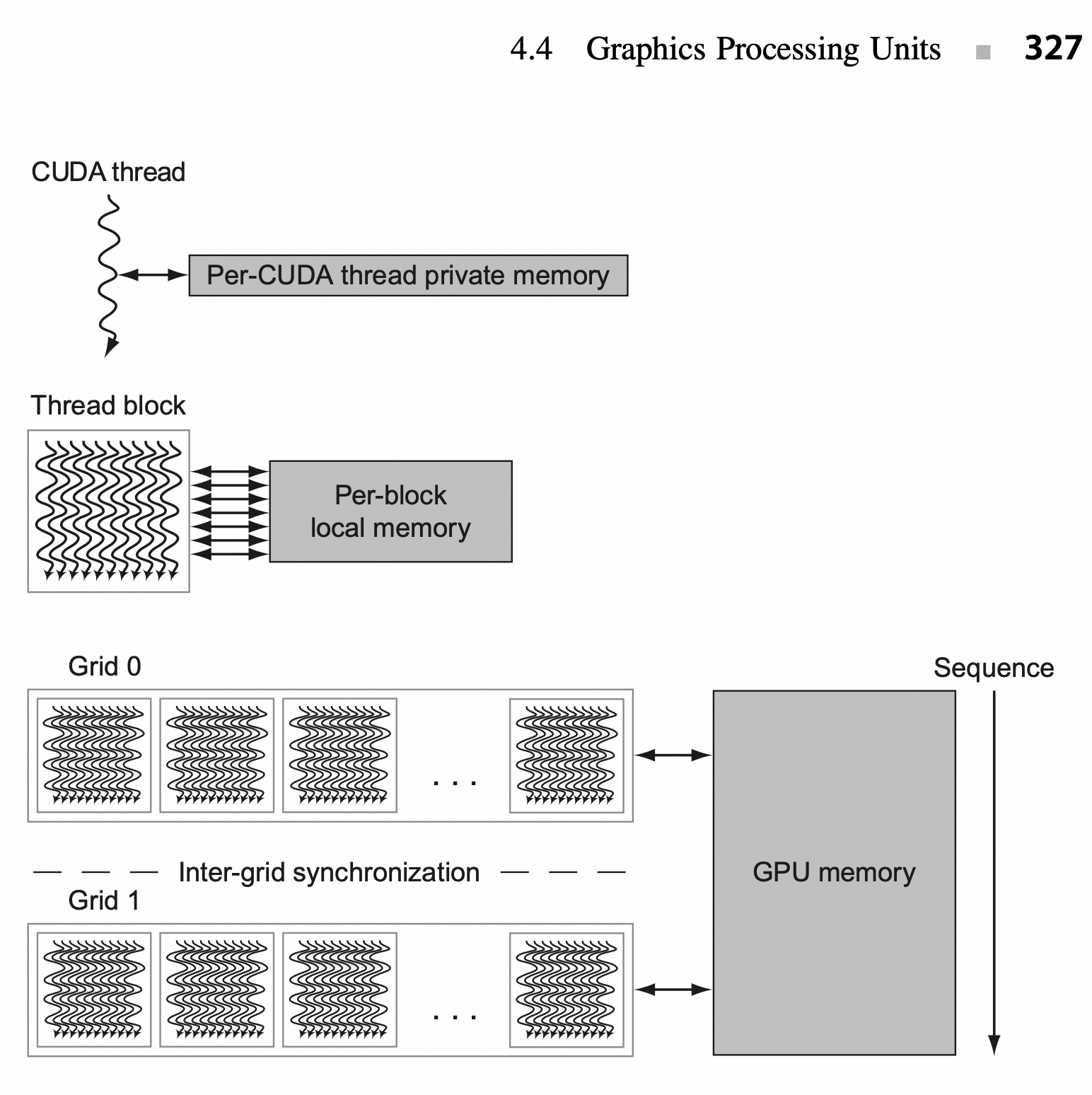
线程模型的硬件抽象:GPU 的编程模型(如 CUDA)提供了线程网格(Grid)、线程块(Block)和线程(Thread)的逻辑划分,但实际的线程分配与执行由硬件完成:
- 线程网格(Grid):由多个线程块组成,表示整个计算任务的规模。
- 线程块(Block):一组线程的集合,绑定到一个流多处理器(SM)上执行。同一块内的线程可通过共享内存协作。
- 线程(Thread):最小执行单元,由硬件直接调度。 程序员只需定义线程结构(如
>>),硬件自动将线程块分配到 SM,并通过线程调度器管理 Warp 的执行顺序,隐藏内存延迟。
硬件资源的自动分配:GPU 的硬件设计专门优化了线程管理:
- 流多处理器(SM):每个 SM 包含多个计算核心(CUDA Core)、共享内存、寄存器文件等资源。SM 可同时运行多个线程块,通过上下文切换(Context Switch)高效利用硬件资源。
- 线程调度器:SM 中的调度器(如 Warp Scheduler)根据线程状态(如是否等待数据)动态选择可执行的 Warp,最大化硬件利用率。
- 内存层次:全局内存、共享内存等的访问由硬件自动优化,减少程序员对内存延迟的显式处理。
6. SM
6.1. SM 的发展
流多处理器(SM)架构随着 GPU 技术的发展不断演进,从最初注重并行处理基本功能,到如今在计算能力、存储管理、指令处理和能效优化等多方面全面提升,以适应日益复杂的计算需求。
- 早期架构与并行处理基础构建(2000 年代初 - 2006 年左右):在 GPU 发展早期,SM 架构开始崭露头角。以英伟达早期产品为例,其主要聚焦于图形处理任务,架构设计围绕并行处理图形数据展开。此时的 SM 包含多个处理核心,能并行处理顶点和像素数据,不过处理核心数量相对较少,缓存和共享内存的规模有限,指令集也主要针对图形渲染优化,比如处理图形的几何变换、光照计算等。
- 计算能力扩展与通用计算支持(2006 - 2012 年):随着通用计算需求的增长,SM 架构迎来变革。英伟达推出 CUDA 架构后,SM 开始支持通用计算。处理核心数量大幅增加,提高了并行计算能力,可处理复杂的矩阵运算、数值模拟等任务。共享内存容量显著提升,方便线程间数据共享,还引入了更灵活的线程调度机制,能够同时管理和执行大量线程,提高计算效率。
- 架构优化与性能提升(2012 - 2018 年):这一时期,SM 架构持续优化。处理核心性能增强,在单位时间内可完成更多计算操作。缓存层次结构更加完善,增加了缓存容量,优化了缓存算法,提升数据访问速度。指令集进一步丰富,支持更多复杂的计算指令。此外,引入了更高效的内存管理机制,减少内存访问延迟,提高整体性能。
- 面向深度学习的变革(2018 年至今):深度学习兴起,SM 架构再次升级。英伟达的安培架构中,SM 集成了专门的 Tensor Core,针对深度学习中的矩阵运算进行加速,大幅提升计算速度。引入稀疏计算支持,提高对稀疏数据的处理效率。在能效方面也进行了优化,降低功耗的同时提高计算性能,以满足大规模深度学习模型训练和推理的需求。
6.2. SM 基本信息
SM 是 GPU 中最基本的并行计算单元,相当于一个 “微型处理器集群”,负责调度和执行线程块(Thread Block)内的所有计算任务。
- 核心功能:
- 管理数百个线程的并行执行(通过硬件线程调度器);
- 集成多种计算单元(CUDA Core、Tensor Core)、缓存、寄存器等,实现高效计算。
- 架构演进:不同代次架构(如 Volta、Ampere、Hopper、Ada Lovelace)的 SM 设计不同,核心变化在于 Tensor Core 的引入与升级,以及 CUDA Core 的优化。
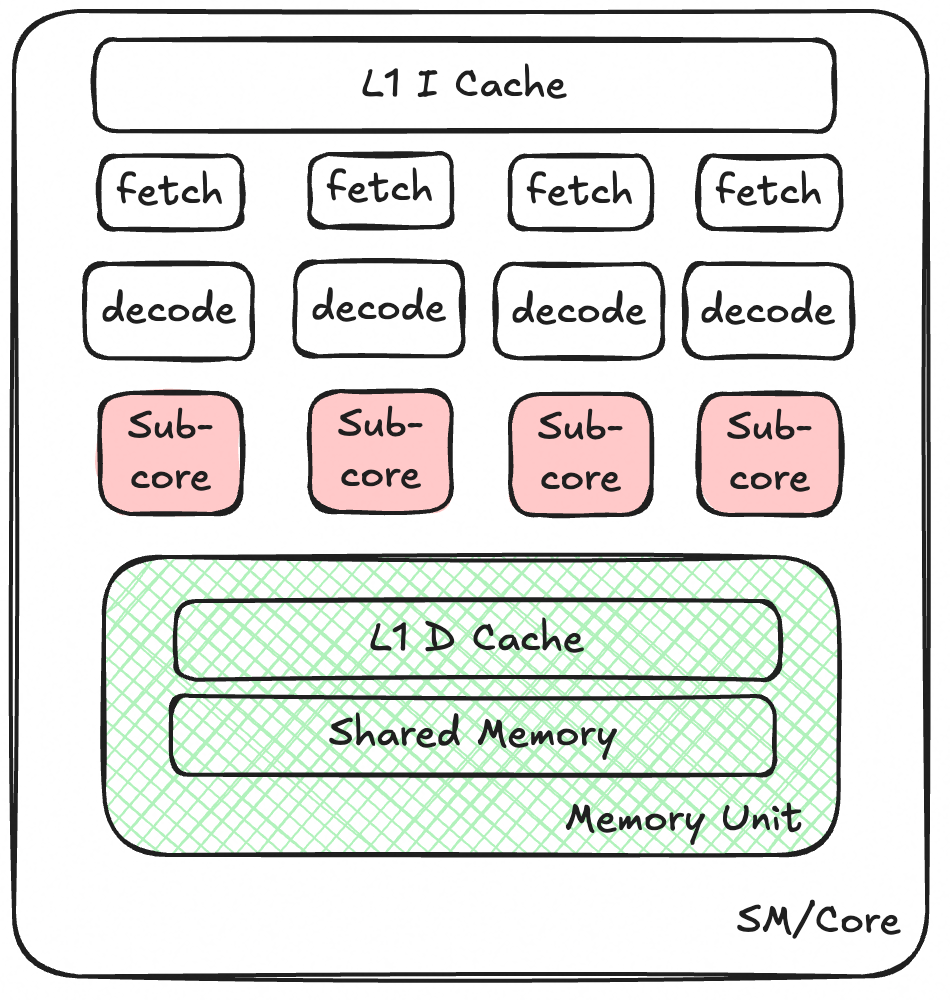 (早期 GPU 微架构,具体可参考项目中的 Excalidraw)
(早期 GPU 微架构,具体可参考项目中的 Excalidraw)
SM 架构对比,以 Hopper vs Ada Lovelace 为例:
| 架构 | SM 核心组件 | Tensor Core 特性 | CUDA Core 数量 / SM |
|---|---|---|---|
| Hopper (H100) | 包含 CUDA Core、第四代 Tensor Core、共享内存、寄存器文件、线程调度器等 | 支持 FP8/INT4 / 稀疏化,FP16 矩阵运算吞吐量提升 | 128 |
| Ada Lovelace (L40S) | 类似 Hopper,但优化了图形相关单元(如 RT Core),Tensor Core 支持 INT4 稀疏化 | 强化 INT4/FP8 推理加速,兼容图形与计算任务 | 128 |
6.3. Tensor Core
SM(Streaming Multiprocessor,流多处理器)和 Tensor Core(张量核心,矩阵核心,专用加速单元)都是 NVIDIA GPU 中的关键组件,它们相互协作,共同提升 GPU 在不同计算任务中的性能。
Tensor Core 是 SM 的组成部分:在 NVIDIA 的 GPU 架构中,如 Volta、Turing 和 Ampere 等,Tensor Core 是集成在 SM 内部的专用处理单元。以 Volta 架构为例,一个 SM 由 4 个 Sub Core 组成,每个 Sub Core 内含有两个 4x4x4 Tensor Core 。Turing 架构的 SM 中,则包含 8 个 Turing Tensor Core。这表明 Tensor Core 是 SM 架构的一部分,依托 SM 的整体架构发挥作用。
功能上相互配合:SM 负责管理和执行大量线程,具备强大的并行数据处理能力,其中的 CUDA 核心能执行通用的并行计算任务,处理各种类型的计算指令。而 Tensor Core 是专门为加速深度学习中的矩阵乘法和累加操作设计的,在深度学习训练和推理任务中,当遇到矩阵运算时,Warp Scheduler(负责调度计算单元工作)会向 Tensor Core 发送矩阵乘法 GEMM 运算指令,Tensor Core 接收来自寄存器文件的输入矩阵,执行矩阵乘法操作,并将结果写回寄存器文件。这体现了 SM 的线程管理和通用计算能力,与 Tensor Core 的深度学习矩阵运算加速能力相互配合。
共同提升计算性能:SM 的架构设计为 Tensor Core 提供了运行环境和数据交互支持,如 SM 中的 L1 指令缓存、L1 数据缓存和共享内存等组件,保障了 Tensor Core 所需数据的读取和计算结果的存储。Tensor Core 的高效矩阵运算能力又提升了 SM 在深度学习任务上的处理速度,两者协同工作,使得 GPU 在通用计算和深度学习等多领域都能有出色的性能表现。
6.3.1. 定位
Tensor Cores 是专为矩阵运算优化的专用硬件单元,首次出现在 2017 年的 Volta 架构(如 V100),后续在 Ampere、Hopper、Ada Lovelace 等架构中持续升级(当前为第四代)。
功能:加速矩阵乘法与累加(GEMM, General Matrix Multiply),即计算 C=A×B+C,其中 A、B、C 为矩阵。
应用场景:
- 深度学习核心场景:神经网络中的线性层(全连接层、Transformer 的 Attention)、卷积层(可转换为矩阵运算),是训练和推理的关键加速单元。
- 科学计算优化:如矩阵求逆、奇异值分解(SVD)等,需配合特定库(如 cuBLAS)使用。
6.3.2. 技术特点
专用性:仅支持特定精度的矩阵运算,包括 FP16、BF16、TF32、INT8、INT4、FP8 等(不同架构支持的精度不同,如 H200 NVL 支持 FP8,L40S 支持 INT4),不处理标量运算。
计算模式:每次处理一个 4×4×4 的矩阵块(输入为两个 4x4 矩阵,输出为 4x4 矩阵并累加),单周期内完成 64 次乘加运算,效率远超 CUDA Cores 的标量累加。
性能优势:
- 以 FP16 为例,Tensor Core 的运算速度通常是 CUDA Core 的8-16 倍(如 H100 的 FP16 Tensor Core 性能为 204.9 TFLOPS,而 FP32 CUDA Core 性能为 51.2 TFLOPS,前者是后者的 4 倍,因 Tensor Core 同时利用低精度和矩阵并行)。
- 支持稀疏化(Sparsity):当矩阵中零值占比达到 50% 时,性能可再提升 1 倍(如表格中 “with Sparsity” 的数值通常是非稀疏模式的 2 倍)。
第四代 Tensor Core(Hopper/Ada Lovelace 架构):支持更多精度(如 FP8、INT4)和稀疏化技术,矩阵运算吞吐量进一步提升(如 H200 NVL 的 FP8 Tensor Core 稀疏性能达 3341 TFLOPS)。
数量对比:Tensor Core 数量远少于 CUDA Cores(如 H200 NVL:528 个 Tensor Core vs 16896 个 CUDA Core),但每个 Tensor Core 的矩阵运算效率极高。
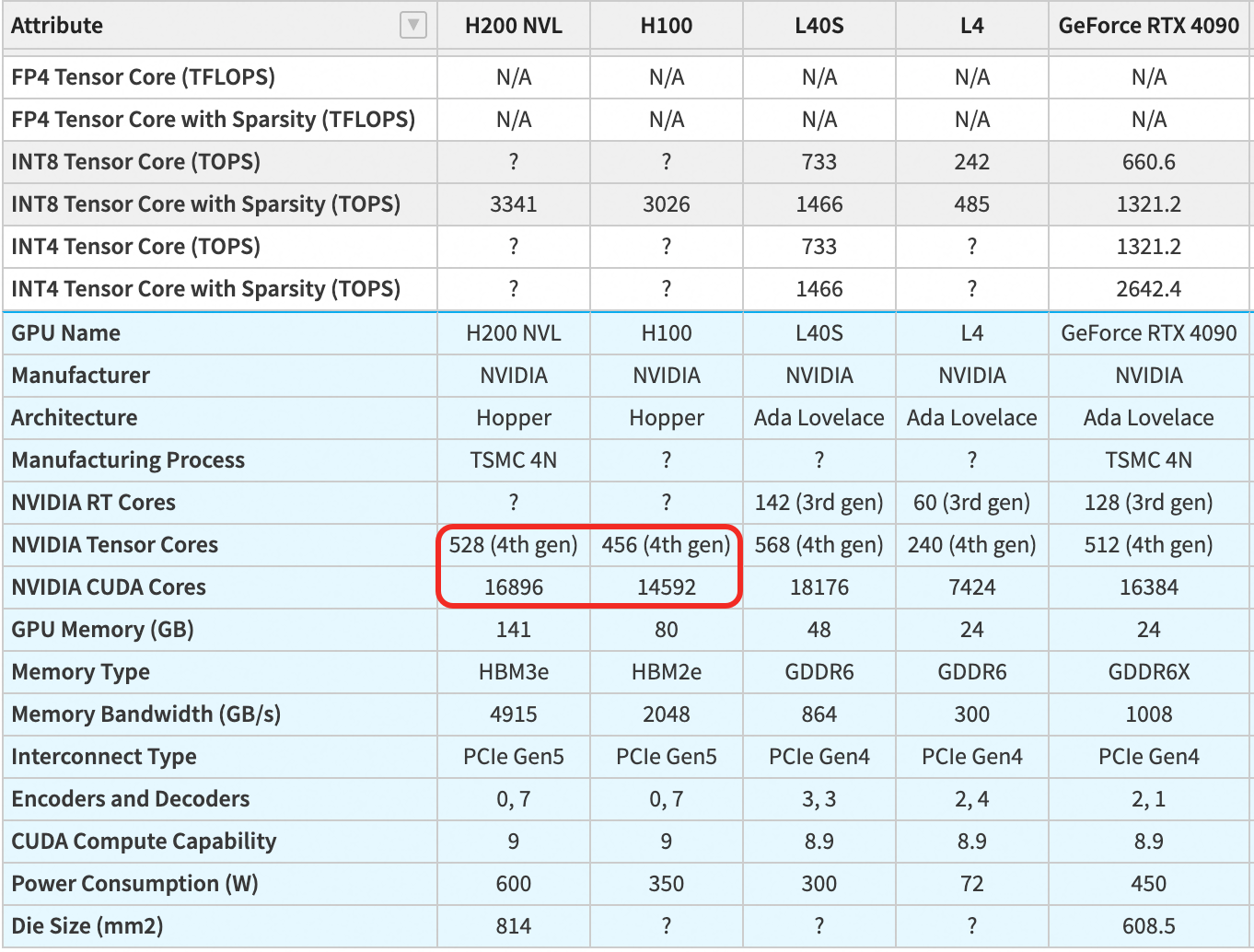
图片来源:https://g.masse.me/gpu-specs/
6.3.3. SM 内的 Tensor Core 布局
- 引入与位置:Tensor Core 自 Volta 架构(2017 年) 开始集成到 SM 中,位于 SM 的专用计算模块内,与 CUDA Core 并列。
- 数量:每个 SM 包含的 Tensor Core 数量随代次升级:
- Volta(V100):每个 SM 有 8 个 Tensor Core(支持 FP16/INT8 矩阵运算);
- Ampere(A100):每个 SM 有 8 个 Tensor Core(支持 TF32/FP16/BF16/INT8,性能提升);
- Hopper(H100/H200 NVL):每个 SM 有 8 个第四代 Tensor Core(支持 FP8/INT4 等更低精度,新增稀疏化加速);
- Ada Lovelace(L40S):每个 SM 有 8 个 Tensor Core(与 Hopper 类似,但优化了 FP8/INT4 支持)。
- 功能定位:
- Tensor Core 是 SM 的 “矩阵运算加速器”,专门处理 4×4 矩阵块的乘加运算(GEMM),单周期内完成 64 次乘加操作(即计算 4×4+4×4=4×4)。
- 仅当计算精度和操作类型(矩阵乘法)匹配时,SM 才会调用 Tensor Core,否则使用 CUDA Core。
6.3.4. 与 SM 的协作
- 数据通路:Tensor Core 的输入输出数据通过 SM 内的专用寄存器文件(Register File)与 CUDA Core 共享,无需经过显存,减少延迟。
- 调度逻辑:当框架(如 PyTorch)调用矩阵运算时,SM 的指令调度器自动判断是否使用 Tensor Core:
- 若为 FP16/BF16/TF32/INT8 等支持的精度且是矩阵运算,则分配给 Tensor Core;
- 否则分配给 CUDA Core(如 FP32 标量运算、INT32 整数操作)。
6.4. Cuda Core
6.4.1. 对比
CUDA Cores 和 Tensor Cores 均为 SM 内部的计算单元,二者在 SM 中以特定结构集成。
| 特性 | CUDA Cores | Tensor Cores |
|---|---|---|
| 定位 | 通用计算单元,处理标量运算 | 专用单元,加速矩阵乘法与累加 |
| 支持精度 | FP64/FP32/INT32 等通用精度 | FP16/BF16/TF32/INT8/FP8 等特定低精度 |
| 计算模式 | 标量运算,单数据点并行 | 矩阵块运算(4x4x4),块级并行 |
| 典型应用 | 图形渲染、科学计算、非矩阵优化任务 | 深度学习矩阵运算(训练 / 推理)、矩阵分解 |
| 性能优势 | 大规模线程并行,通用性强 | 单核心超高矩阵运算效率(比 CUDA Core 快数倍) |
| 首次出现架构 | 所有 CUDA 架构(2006 年至今) | Volta 架构(2017 年),当前为第四代 |
| 在深度学习中,两者通常协同工作: |
- Tensor Cores:处理神经网络中的矩阵运算(如前向传播、反向传播的梯度计算),由框架(PyTorch/TensorFlow)或库(cuDNN)自动调用,大幅减少计算时间。
- CUDA Cores:处理辅助任务,如数据预处理、激活函数(ReLU/Sigmoid)、非矩阵化的张量操作(如索引、切片),以及不支持 Tensor Core 的精度(如 FP64 训练)。
例如,在训练一个 Transformer 模型时:
- 矩阵乘法(Q/K/V 投影、FFN 层)由 Tensor Cores 加速;
- 层归一化、Softmax 等标量运算由 CUDA Cores 处理。
6.4.2. SM 内的 CUDA Core 布局
数量:每个 SM 包含多个 CUDA Core,具体数量随架构变化:
- Volta 架构(V100):每个 SM 有 64 个 CUDA Core;
- Ampere 架构(A100):每个 SM 有 128 个 CUDA Core;
- Hopper 架构(H100/H200 NVL):每个 SM 有 128 个 CUDA Core;
- Ada Lovelace 架构(L40S):每个 SM 有 128 个 CUDA Core(与 Ampere 类似,但优化了指令调度)。
功能定位:
- CUDA Core 是 SM 的 “通用计算基石”,负责处理标量运算(如 FP32/FP64 浮点、INT32 整数运算),以及不适合 Tensor Core 的任务(如激活函数、数据预处理)。
- 每个 CUDA Core 独立执行一条线程的标量指令,SM 通过同时调度数千个线程(分布在多个 CUDA Core 上)实现大规模并行计算。
6.4.3. 与 SM 的协作
SM 通过线程束(Warp,32 个线程为一组) 调度 CUDA Core:
- 每个 Warp 的 32 个线程分配到 32 个 CUDA Core 上并行执行(如 Hopper 的 SM 有 128 个 CUDA Core,可同时处理 4 个 Warp);
- 当 CUDA Core 执行浮点或整数指令时,SM 的控制单元(如指令调度器)负责分发任务并同步结果。
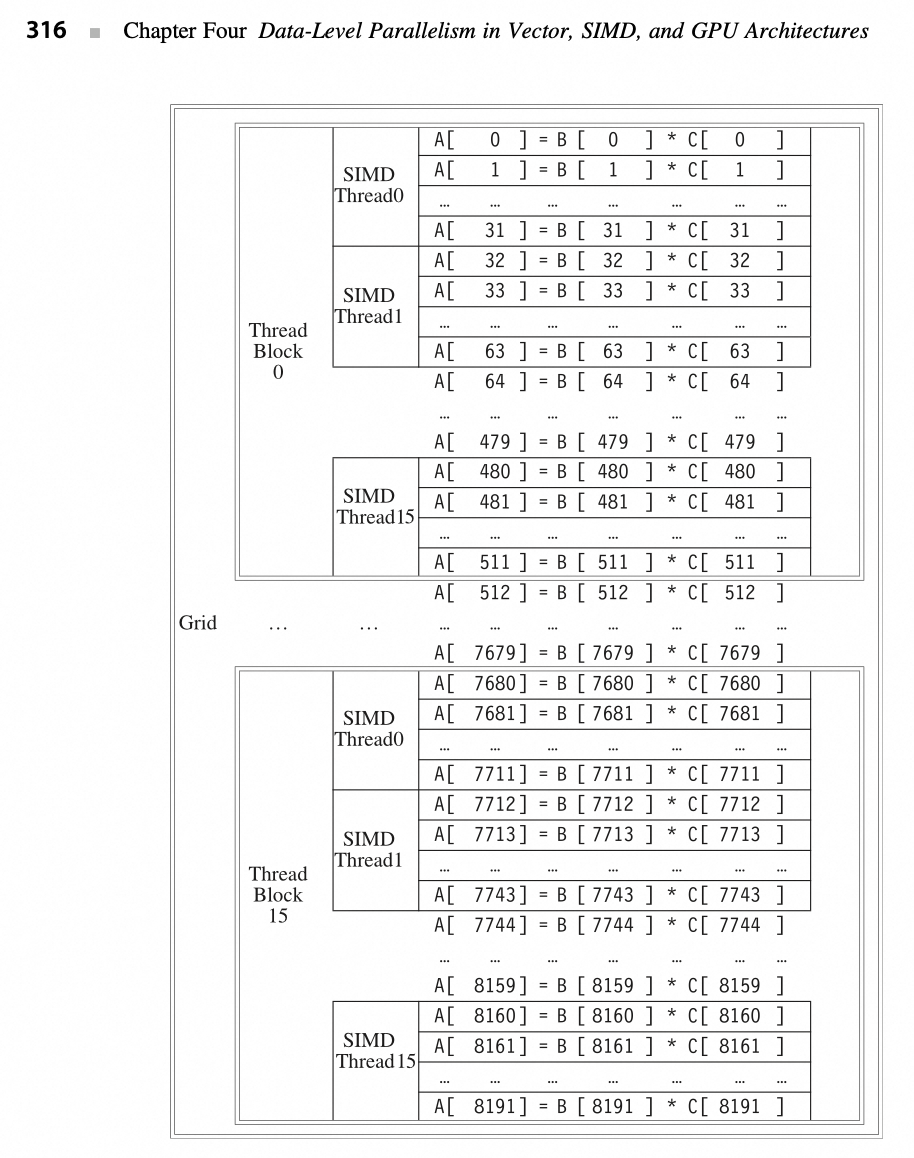
6.5. 举例:Grid/Block/Thread
关系的示意图如下所示:(图中表示 , 两个向量相乘,每个向量的长度为 8192 个元素)。
- 每个 SIMD 线程指令计算 32 个元素;
- 每个线程块包含 16 个 SIMD 线程;
- 网格包含 16 个线程块。
6.6. 与 CPU 的对比
CPU:依赖操作系统管理线程调度(如多核任务分配),线程切换和资源分配由软件控制,适合复杂逻辑和低延迟任务。
GPU:硬件直接管理线程,通过 SIMT 架构和大量线程掩盖内存延迟,适合数据并行任务(如矩阵运算、图像处理)。
总结:GPU 的硬件设计使得并行执行和线程管理成为“黑箱”,程序员只需关注任务的并行划分(如线程块大小),而具体的线程调度、资源分配和延迟隐藏均由硬件自动完成。这种设计大幅提升了并行计算效率,同时降低了编程复杂度。
GPU 的硬件设计如何隐藏线程管理细节并提升并行计算效率:
GPU(图形处理器)的架构与传统 CPU 有着根本性的不同,它专为大规模并行计算优化,能够同时运行成千上万个线程。GPU 之所以能够高效执行并行计算,关键在于其硬件设计隐藏了线程调度、资源分配以及延迟隐藏的复杂性,使得开发者只需要关注任务的并行划分,而无需直接管理底层的并行执行细节。
6.6.1. GPU 线程管理的“黑箱”特性
在 GPU 上,程序员通常通过 CUDA(NVIDIA)或 HIP(AMD)等并行计算框架,定义计算任务的并行性。开发者需要做的主要工作是:
• 确定数据并行模式:任务如何划分为多个线程进行处理。
• 选择线程块大小(Thread Block Size):GPU 计算通常基于“线程块(Thread Block)”的概念,程序员需要决定每个块中的线程数。
• 确定网格(Grid)结构:将线程块映射到更大范围的计算任务。
然而,一旦任务被划分好,线程的具体执行顺序、分派到哪个计算单元、如何进行调度、如何隐藏延迟等,完全由 GPU 硬件自动管理,这与传统 CPU 上需要开发者手动优化线程调度和同步的做法形成鲜明对比。
6.6.2. GPU 自动完成的线程管理机制
GPU 硬件通过多个机制隐藏线程管理细节,从而优化计算效率:
(1) 线程调度(Warp Scheduling):
GPU 的基本执行单元是“Warp”或“Wavefront”(如 NVIDIA 的 Warp 由 32 个线程组成,AMD 的 Wavefront 通常为 64 个线程)。GPU 的硬件调度器负责:
- 自动分配 Warp 到计算单元(Streaming Multiprocessors, SM)
- 在不同 Warp 之间交错执行,以最大化硬件利用率
- 屏蔽不同线程的执行细节,开发者不需要关心线程具体如何被调度
例如,在 CPU 上,如果多个线程争夺相同的核心,可能会导致复杂的上下文切换(context switch),而 GPU 通过“零开销线程切换”机制,在一个 Warp 执行遇到内存访问延迟时,硬件可以快速切换到另一个 Warp,隐藏延迟,从而提高计算效率。
(2) 资源分配(Register & Shared Memory Management):
GPU 采用分层存储架构,包括:
• 寄存器(Register File)
• 共享内存(Shared Memory)
• 全局内存(Global Memory)
• 纹理/常量内存(Texture/Constant Memory)
不同线程块的资源分配由硬件自动管理:
- GPU 会根据线程块的大小,自动划分可用的寄存器和共享内存,确保线程间不会发生资源冲突
- 程序员无需手动管理内存访问模式,硬件会自动进行 数据合并(Memory Coalescing) 以优化内存访问
在 CPU 上,开发者需要手动进行缓存优化,而在 GPU 上,很多缓存优化(如 L2 Cache、共享内存)由硬件完成,大大减少了程序优化的复杂度。
(3) 延迟隐藏(Latency Hiding):
CPU 主要依靠深度流水线(Deep Pipeline)和分支预测(Branch Prediction) 来减少指令执行的延迟,而 GPU 采用了大规模线程切换(Thread-Level Parallelism, TLP) 来隐藏延迟:
- 当某个 Warp 等待内存访问时,GPU 硬件会自动调度另一个 Warp 执行,避免计算单元空闲
- 这种策略能够充分利用 GPU 的超大存储带宽(如 HBM 高带宽存储),在数百至数千个线程间动态调度计算任务
这种延迟隐藏机制使得程序员不需要像在 CPU 上那样进行复杂的流水线优化、寄存器重命名等,而是交给 GPU 硬件自动优化。
6.6.3. GPU 这种硬件设计的优势
(1) 降低编程复杂度
由于线程管理和调度均由硬件完成,开发者只需要关注:
• 如何划分计算任务
• 如何选择合理的线程块大小
• 如何优化数据访问模式(如避免共享内存冲突)
相较于 CPU 上需要手动管理线程、同步、缓存等,GPU 的这种设计大大降低了并行编程的门槛,使得更多开发者能够利用 GPU 进行加速计算。
(2) 提升并行计算效率
• 由于 GPU 能够同时管理数万个线程,并通过自动调度 Warp 来优化资源利用率,使得 GPU 在数据并行任务上展现出极高的吞吐率
• 通过零开销线程切换,GPU 在面对高延迟操作(如全局内存访问)时依然能够保持高效执行,而 CPU 可能会因为缓存未命中导致停滞
• 通过自动资源分配和寄存器优化,避免了 CPU 上需要手动进行的复杂优化
(3) 适用于大规模计算任务
GPU 的这种设计特别适合:
深度学习和 AI 训练(如 TensorFlow、PyTorch):因为矩阵计算可以高度并行化
科学计算和 HPC(如气候模拟、基因计算):涉及大量浮点运算的任务
大规模图形渲染(如游戏和视觉计算):GPU 本就是为并行渲染设计的
数据库加速(如 GPU 加速 SQL 查询):高吞吐率可以显著提升查询性能
6.6.4. 结论
GPU 通过将线程调度、资源分配、延迟隐藏等低层细节封装在硬件中,使得开发者能够更专注于任务的并行划分,而无需关心具体的线程管理。这种“黑箱”设计使得 GPU 能够高效执行大规模并行计算任务,同时大幅降低了并行编程的复杂度,从而推动了 AI、HPC、图形渲染等领域的快速发展。
这种架构的核心理念是让硬件管理并行性,让开发者专注于计算逻辑,从而最大化计算资源的利用率,实现高效的并行计算。
7. Q2
硬件线程块调度器(Thread Block Scheduler)将线程块(Thread Blocks)分配给多线程 SIMD 处理器(multithreaded SIMD Processors),而硬件线程调度器(Thread Scheduler)在每个时钟周期内选择要在 SIMD 处理器中运行的 SIMD 指令线程(thread of SIMD instructions)。
这句话描述了 GPU 内部的线程块调度(Thread Block Scheduling) 和线程调度(Thread Scheduling) 两个层次的机制,并且强调了线程调度是逐个时钟周期进行的,也就是在每个 SIMD 处理器内部的指令选择是动态的。
7.1. 硬件线程块调度器 (Thread Block Scheduler)
- 负责将线程块(Thread Blocks) 分配给多线程 SIMD 处理器(Multithreaded SIMD Processors)。
- 在 GPU 计算模型(如 CUDA、HIP、OpenCL)中,一个计算任务通常会被划分成多个线程块,每个线程块内部包含多个线程(Threads)。
- 由于 GPU 由多个 SIMD 处理单元(如 Streaming Multiprocessors(SM) 或 Compute Units(CU))组成,因此需要线程块调度器负责把任务均匀分配到这些处理单元上。
如果一个 GPU 有 8 个 SIMD 处理单元,而计算任务包含 64 个线程块,线程块调度器可能会将每个 SIMD 处理单元分配 8 个线程块,确保所有计算单元都参与计算,从而最大化吞吐量。
7.2. 硬件线程调度器 (Thread Scheduler)
负责在每个 SIMD 处理器内部,每个时钟周期(clock cycle) 选择一个要执行的 SIMD 指令线程(thread of SIMD instructions)。
由于 GPU 采用 SIMT(Single Instruction, Multiple Threads) 计算模式,每个 SIMD 处理单元可以同时执行多个 Warp(NVIDIA)/Wavefront(AMD),但由于计算资源有限,必须在多个候选线程中选择合适的线程执行。
关键点:
多个 Warp/Wavefront 竞争执行权:在一个 SIMD 处理单元内部,可能有几十到上百个 Warp/Wavefront 处于就绪(ready) 状态,但一次只能执行一个 Warp/Wavefront 的 SIMD 指令。
调度发生在每个时钟周期:线程调度器在每个时钟周期(clock cycle) 都会选择一个 Warp/Wavefront,执行它的下一条 SIMD 指令。
影响调度决策的因素:
- 指令依赖性(Instruction Dependencies): 如果某个 Warp/Wavefront 需要的数据还没准备好,调度器可能会跳过它,选择另一个 Warp/Wavefront。
- 寄存器压力(Register Pressure): 如果某个 Warp/Wavefront 占用了太多寄存器,可能会降低调度器的灵活性。
- 内存访问延迟(Memory Latency): 如果某个 Warp/Wavefront 需要访问 DRAM,调度器可能会选择另一个不受内存访问限制的 Warp/Wavefront 先执行。
7.3. 示例
假设一个 SIMD 处理器可以并行执行 32 个线程(即 1 个 Warp/Wavefront),但它可能维护了 64 个 Warp/Wavefront 在等待执行。
线程调度器会在每个时钟周期选择一个就绪(ready) 的 Warp/Wavefront,执行其中的 SIMD 指令。
如果某个 Warp/Wavefront 的内存访问未完成,线程调度器可能会选择另一个已经准备好执行的 Warp/Wavefront,以隐藏延迟(latency hiding)。
7.4. 总结
Thread Block Scheduler(线程块调度器):
- 作用: 负责在多个 SIMD 处理单元(如 SM/CU) 之间分配线程块(Thread Blocks)。
- 目标: 确保所有 SIMD 处理单元都参与计算,提高吞吐量。
Thread Scheduler(线程调度器):
- 作用: 负责在每个 SIMD 处理单元内部,每个时钟周期(clock cycle) 选择一个 Warp/Wavefront,执行其中的 SIMD 指令。
- 目标: 通过动态调度 Warp/Wavefront,最大化计算资源的利用率,同时隐藏内存访问延迟。
7.5. 直观比喻
可以把整个 GPU 计算过程比作工厂流水线:
- Thread Block Scheduler 类似于车间经理,负责把不同的任务分配给多个生产线(SIMD 处理单元)。
- Thread Scheduler 类似于生产线上的调度员,每秒钟(每个时钟周期)都要决定当前哪条生产线上的工作站(Warp/Wavefront)应该执行下一步任务。
这样,GPU 通过多层次调度,在硬件层面实现高吞吐量并行计算,有效地利用计算资源。
8. Explicit Predicate Registers(显式谓词寄存器)
Explicit Predicate Registers(显式谓词寄存器)通常出现在支持 VLIW(超长指令字) 或 SIMD(单指令多数据) 体系结构的 CPU 和 GPU 设计中,用于实现指令级并行(ILP) 和数据级并行(DLP)。它们的主要作用是存储和控制指令或数据的执行条件。
8.1. 什么是 Explicit Predicate Registers?
在计算机体系结构中,predicate(谓词) 是一个布尔值(0/1),用于指示某条指令是否应该执行。Predicate 允许在不需要分支指令(如 if-else 或 branch)的情况下,实现条件执行(conditional execution)。这在减少流水线分支预测失败、提高指令并行度方面非常重要。
Predicate Registers(谓词寄存器) 存储这些布尔值,每个谓词寄存器通常存储一个或多个谓词位。例如,在向量化执行时,每个 SIMD 线程可以有一个对应的谓词寄存器位,控制它是否执行当前指令。
显式谓词寄存器(Explicit Predicate Registers) “显式”指的是架构直接提供专门的谓词寄存器,而不是依赖通用寄存器或状态标志位。例如:
Intel AVX-512: 提供 16 个 mask registers(k0-k15),用于 SIMD 向量化中的条件掩码。
AMD CDNA / RDNA: GPU 采用谓词寄存器来管理 SIMT(单指令多线程)执行,控制哪些线程在 warp/wavefront 中生效。
Itanium(IA-64): 采用了大量的谓词寄存器(64 个),用于 VLIW 指令并行调度。
ARM SVE(Scalable Vector Extension): 提供了显式谓词寄存器 p0-p7,用于向量掩码操作。
8.2. 显式谓词寄存器的作用
避免分支预测失败:传统 if-else 代码会引入分支预测,而谓词寄存器允许无分支执行,减少分支预测开销。例如:
; x86 AVX-512
VPADDQ ZMM1, ZMM2, ZMM3 {k1} ; 仅在 k1 掩码为 1 的位置执行加法提高指令并行度(ILP):现代 CPU 会同时调度多个指令,使用谓词寄存器可以让不同指令并行执行,不必等待分支决策完成。
向量化计算(SIMD/SIMT):GPU 和向量指令集利用谓词寄存器进行掩码计算,控制哪些元素参与计算,例如:
; ARM SVE
ADD Z0.S, P0/M, Z1.S, Z2.S ; 仅对 P0 掩码为 1 的元素执行加法减少控制依赖(Control Dependency):传统流水线 CPU 需要预测分支,而谓词寄存器让所有指令都进入流水线,只是在执行阶段选择是否生效,降低分支误预测的开销。
8.3. 典型应用
AI 和 HPC: 深度学习推理(如 Transformer 模型)和数值计算中,经常使用 AVX-512、SVE、CDNA/RDNA 的 SIMD/矩阵运算,显式谓词寄存器用于掩码计算。
编译器优化: LLVM、GCC 在自动向量化过程中,会利用谓词寄存器生成无分支代码,提升 SIMD 效率。
GPU Wavefront 处理: AMD RDNA/CDNA GPU 使用显式谓词寄存器管理Wavefront 屏蔽(Wave Masking),让 SIMD 线程更高效地执行 warp/wave 级分支。
总结
显式谓词寄存器是一种专门用于条件执行的寄存器,广泛应用于 VLIW、SIMD、SIMT 体系结构。它们的优势包括减少分支预测失败、提高指令并行度、提升向量化计算效率,在现代 CPU/GPU 体系结构中扮演关键角色。
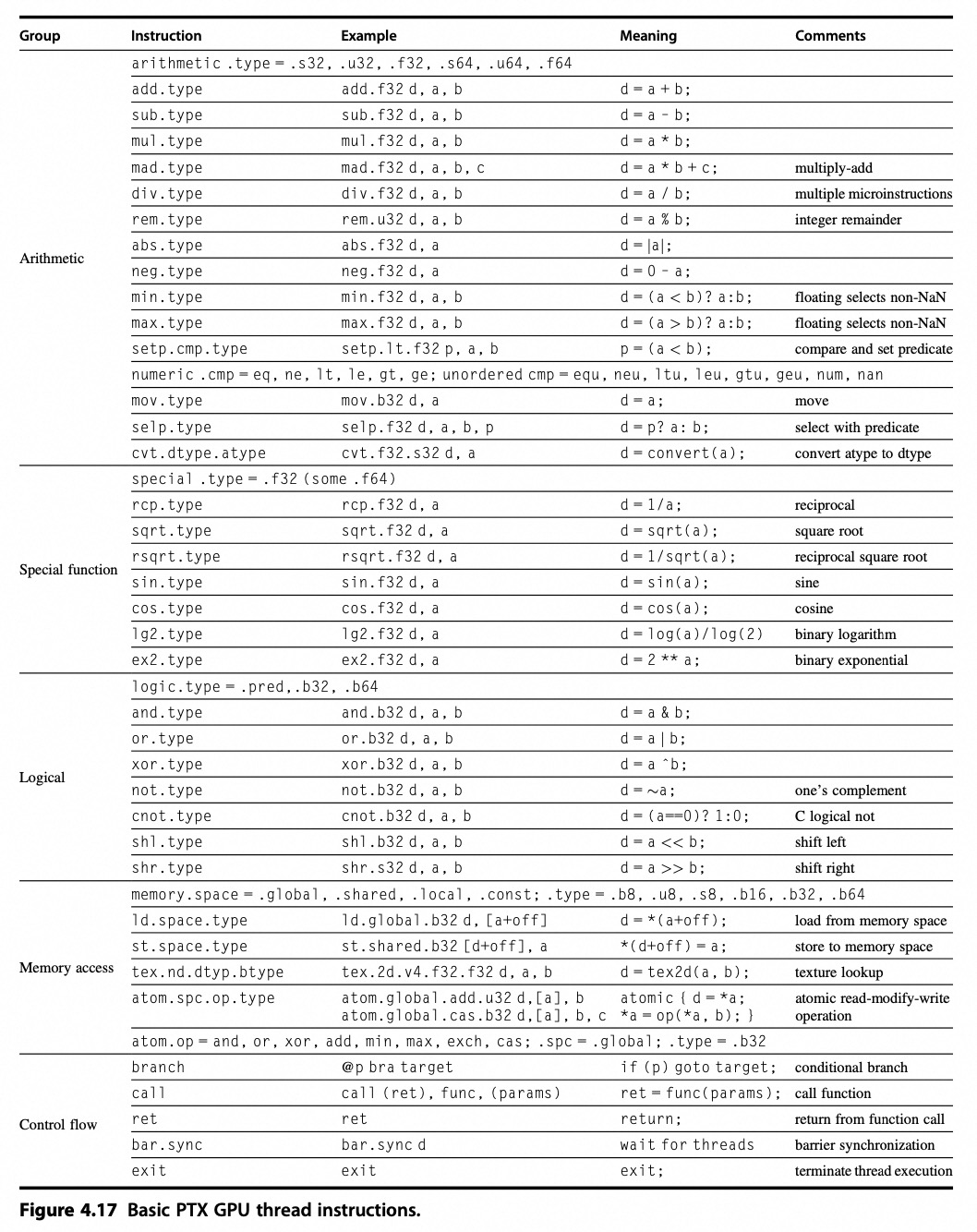
9. NVIDA GPU 指令集体系结构
列举部分指令:
10. NV GPU 存储结构
10.1. Streaming Caches
Rather than rely on large caches to contain the whole working sets of an application, GPUs traditionally use smaller streaming caches and, because their working sets can be hundreds of megabytes, rely on extensive multithreading of threads of SIMD instructions to hide the long latency to DRAM.
这句话的意思是:
与其依靠大容量的缓存来容纳应用程序的整个工作集,GPU 传统上采用更小的流式缓存。由于 GPU 的工作集可能达到数百兆字节,为了掩盖访问 DRAM(动态随机存取存储器)时的长延迟,GPU 依靠大量的线程并行执行 SIMD(单指令多数据)指令来隐藏这些延迟。
- 大缓存 vs. 小流式缓存
- CPU 通常使用较大的缓存(如 L2/L3 缓存)来存储经常访问的数据,从而减少对主存(DRAM)的访问次数。
- GPU 则采用小型流式缓存(Streaming Cache)。它主要用于临时存储数据,通过高速缓存访问来减少访存延迟,但不会试图容纳整个应用的工作集。
Workload 大小:GPU 的应用场景(如图像处理、深度学习等)通常需要处理海量数据,其 Workload 可能达到数百兆字节,远超缓存的容量。
隐藏内存延迟
- 由于 DRAM 访问的延迟较长,GPU 不像 CPU 那样依靠复杂的缓存层级来降低延迟。
- GPU 采用大量的线程(通过 SIMT/SIMD 方式)执行,确保在某个线程等待数据返回时,其他线程可以继续执行其他任务。这种方法有效地隐藏内存访问延迟。
- SIMD 指令:GPU 通过 SIMD 指令(Single Instruction, Multiple Data)执行一条指令,同时操作多个数据项。再结合超线程调度,多线程并行执行进一步提高了吞吐量。
GPU 的架构设计强调吞吐量而非低延迟。通过依靠小型流式缓存和多线程掩盖内存延迟,GPU 能高效处理大规模数据并执行并行计算。
注
此处命名为 数据,但这里并没有提供具体数据集,而是提供了处理获取大规模数据的方法
11. Device and Stream
在 CUDA 编程里,device(设备)和 stream(流)是两个关键概念,它们存在着密切的联系,下面将为你详细介绍它们之间的关系。
11.1. 基本概念
- Device:在 CUDA 语境中,
device通常指的是 GPU。CUDA 程序可以在多个 GPU 设备上并行运行,每个 GPU 设备都有其独立的内存和计算资源。 - Stream:
stream是一系列按顺序执行的 CUDA 操作队列。同一流内的操作会按照顺序依次执行,不同流内的操作则可以并行执行,这样就能提高 GPU 资源的利用率。
11.2. 二者关系
- 设备包含多个流:一个
device(GPU)能够同时管理多个stream。借助多个流,你可以让不同的 CUDA 操作在同一个 GPU 上并行执行,以此提升整体性能。例如,在一个 GPU 上可以同时开启数据传输流和内核执行流,使数据传输和内核计算并行进行。 - 流在设备上执行:所有的
stream都必须依附于某个device。当你创建一个stream时,实际上是在特定的 GPU 设备上创建了一个操作队列。不同设备上的流是相互独立的,不能跨设备共享。 - 通过流管理设备资源:合理运用
stream能够更好地管理device(GPU)的资源。例如,你可以把不同类型的任务分配到不同的流中,像将数据传输任务和内核计算任务分别放到不同的流里,从而实现数据传输和内核计算的重叠,充分利用 GPU 的带宽和计算能力。
11.3. 示例代码
下面是一个简单的 CUDA C++代码示例,展示了如何在一个 GPU 设备上创建和使用多个流:
#include <cuda_runtime.h>
#include <iostream>
__global__ void kernel(float* d_a, float* d_b, float* d_c, int n) {
int idx = threadIdx.x + blockIdx.x * blockDim.x;
if (idx < n) {
d_c[idx] = d_a[idx] + d_b[idx];
}
}
int main() {
const int n = 1024;
const int blockSize = 256;
const int gridSize = (n + blockSize - 1) / blockSize;
float *h_a, *h_b, *h_c;
float *d_a, *d_b, *d_c;
// 分配主机内存
h_a = (float*)malloc(n * sizeof(float));
h_b = (float*)malloc(n * sizeof(float));
h_c = (float*)malloc(n * sizeof(float));
// 初始化主机数据
for (int i = 0; i < n; i++) {
h_a[i] = static_cast<float>(i);
h_b[i] = static_cast<float>(i * 2);
}
// 分配设备内存
cudaMalloc((void**)&d_a, n * sizeof(float));
cudaMalloc((void**)&d_b, n * sizeof(float));
cudaMalloc((void**)&d_c, n * sizeof(float));
// 创建两个流
cudaStream_t stream1, stream2;
cudaStreamCreate(&stream1);
cudaStreamCreate(&stream2);
// 在流1中执行数据传输和内核计算
cudaMemcpyAsync(d_a, h_a, n * sizeof(float), cudaMemcpyHostToDevice, stream1);
cudaMemcpyAsync(d_b, h_b, n * sizeof(float), cudaMemcpyHostToDevice, stream1);
kernel<<<gridSize, blockSize, 0, stream1>>>(d_a, d_b, d_c, n);
cudaMemcpyAsync(h_c, d_c, n * sizeof(float), cudaMemcpyDeviceToHost, stream1);
// 在流2中执行另一个任务(这里简单示例为同步操作)
cudaStreamSynchronize(stream2);
// 销毁流
cudaStreamDestroy(stream1);
cudaStreamDestroy(stream2);
// 释放设备内存
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_c);
// 释放主机内存
free(h_a);
free(h_b);
free(h_c);
return 0;
}在这个示例里,我们在同一个 GPU 设备上创建了两个流 stream1 和 stream2,并在 stream1 中执行了数据传输和内核计算任务。这样,通过使用流,我们能够更好地管理 GPU 设备的资源,提高程序的性能。
11.4. Stream 的进一步细分理解
从功能和操作类型角度,Stream内的操作可以更细致地划分:
内存操作流:
- 主机到设备的内存传输:借助
cudaMemcpyAsync函数,能把数据从主机(CPU)内存异步传输到设备(GPU)内存。比如在深度学习训练里,需把输入数据和标签从主机内存传至 GPU 内存,以开展后续计算。 - 设备到主机的内存传输:同样使用
cudaMemcpyAsync函数,可将数据从设备内存异步传输回主机内存。例如在推理结束后,要把计算结果从 GPU 内存传回 CPU 内存进行后续处理。 - 设备内的内存操作:像
cudaMemsetAsync可用于异步地将设备内存的某个区域设置为特定值,cudaMemcpyPeerAsync能在不同 GPU 设备间异步传输数据。
- 主机到设备的内存传输:借助
内核执行流:用于调度和执行 CUDA 内核函数。CUDA 内核是在 GPU 上并行执行的函数,可同时处理大量数据。例如,在矩阵乘法运算中,可编写一个 CUDA 内核函数,让大量线程并行计算矩阵元素的乘积和累加结果。
事件同步流:CUDA 事件可用于记录流中特定操作的完成时间,并且能实现不同流之间的同步。例如,你可以在一个流中记录一个事件,在另一个流中等待该事件完成后再继续执行后续操作,以此确保不同流中的操作按特定顺序执行。
12. Cuda 内核
CUDA 内核是在 GPU 上并行执行的函数。它由大量线程组成,这些线程会被组织成线程块和网格。每个线程负责处理数据的一部分,众多线程同时运行,从而实现并行计算。以下是一个简单的 CUDA 内核示例,用于实现向量加法:
__global__ void vectorAdd(float* a, float* b, float* c, int n) {
int idx = threadIdx.x + blockIdx.x * blockDim.x;
if (idx < n) {
c[idx] = a[idx] + b[idx];
}
}在这个示例中,__global__ 关键字表明这是一个 CUDA 内核函数。threadIdx.x 表示线程在块内的索引,blockIdx.x 表示块在网格内的索引,blockDim.x 表示块的大小。通过这些索引,每个线程可以确定自己要处理的数据位置。